CONNECTIVITY
Digital Map with dynamic constraints configuration Job Management and Customization Intelligent Task Scheduling AI based Fleet optimization Notification / Alerting […]
transforming ideas

Digital Map with dynamic constraints configuration Job Management and Customization Intelligent Task Scheduling AI based Fleet optimization Notification / Alerting […]
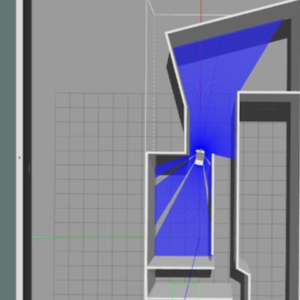
It is tailored for a context-aware decision-making process, enabling the generation of efficient maneuvers and optimal local trajectories to navigate dynamic environments and avoid obstacles seamlessly. The model-based control schemes ensure precise trajectory tracking. The solution also has configurable traversal policies, enhancing adaptability to a wide range of deployment areas.
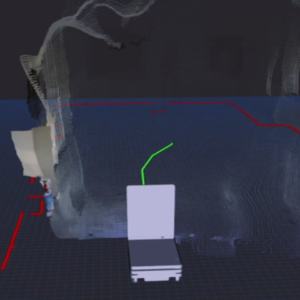
Our perception framework relies on heterogeneous sensors, through advanced fusion algorithms to create a highly accurate 2.5 dynamic occupancy grid. The map-based localization feature utilizes visual cues, Inertial Navigation Unit (INU) pose data, and wheel odometry, ensuring precise pose information with an exceptional accuracy of less than 5 cm even in tight and narrow pathways.